In recent years, the Aging population problem is becoming more and more apparent. Technical aids are required allowing aging people to live independently and be supported in their private homes as long as they wish. Many researches propose that using the mobile robots system to provide daily service and help people with difficult and inconvenient work can be a solution.
| Date: | 2012 |
| My Role: | Developer |
| Category: | Master Thesis, Personal Research |
In order to execute the assignments, mobile robots are asked to become automatic and intelligent. The basic missions of the home- care system are like delivering the medicine and moving to the falling-down elderly.
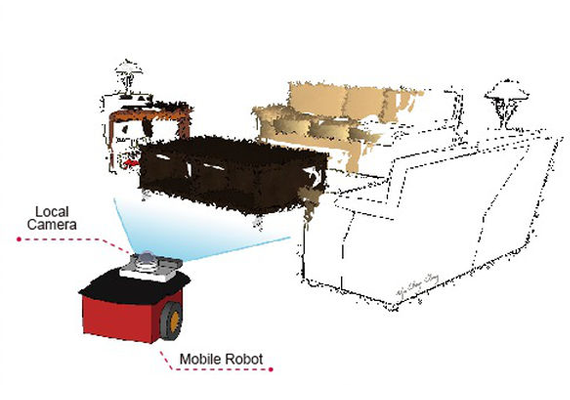
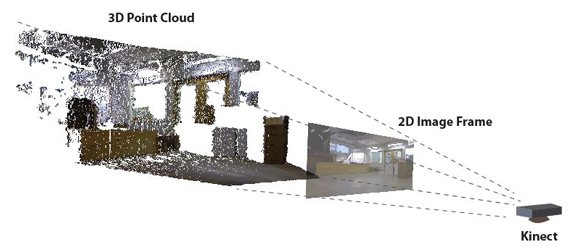
For the mobile robot system, the visual servo is like the eyes of the robot. There is much more information can be retrieved or analyzed by the camera, i. e., not only color image the data but also the depth information.
This thesis aimed to apply the visual servo system with the mobile robot for the home- care system to help everyday life of the elderly and disabled people. We design a visual servo control based mobile robotic control system (P3DX), which is able capable to traverse through arbitrary obstacles (Chair etc.), find and hit all unhidden and hidden in the robot testing area, and finally transmit information to a PC that will graphically display the robot’s telemetry information and ground layout. To deal with all these problems, this study has to accomplish various objectives such as map building and obstacles and targets identifying, path planning and motion control, navigating/collecting information within obstacle, traversing a closed path within obstacle, transmitting information using transceivers, processing and displaying received data, and finding the red and blue balloon and bursting it…etc.
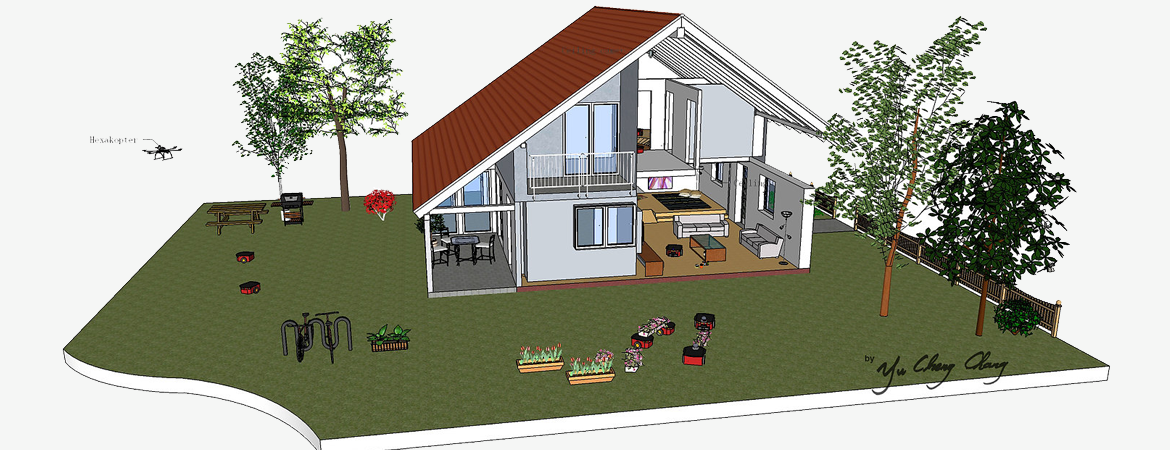
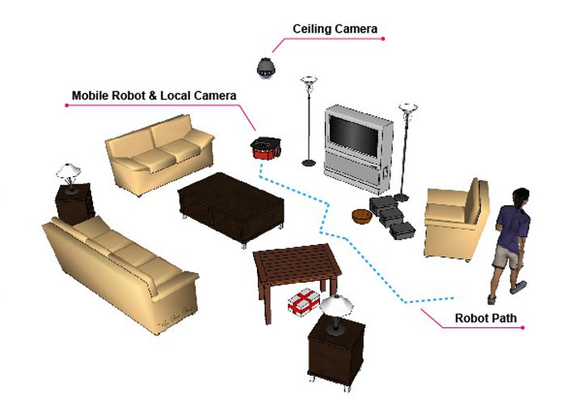
This project propose the sensor integration in visual navigation of a mobile robot.The global eye-to-hand system use an Wide-Angle camera mounted on the ceiling for mapping, localization and path planning. The local eye-in-hand system use the RGB-D camera mounted on the mobile robot to compensate the partial and incomplete information from the global vision system.
The significance of this work is summarized as
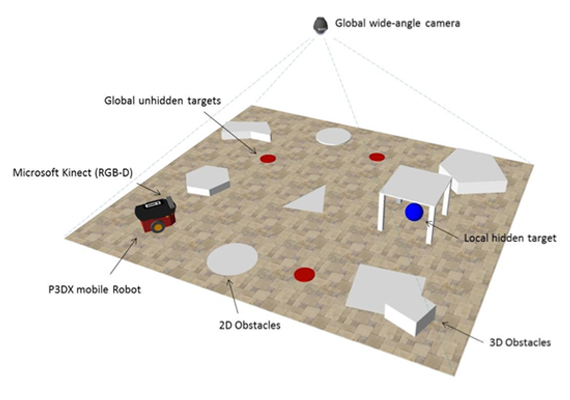
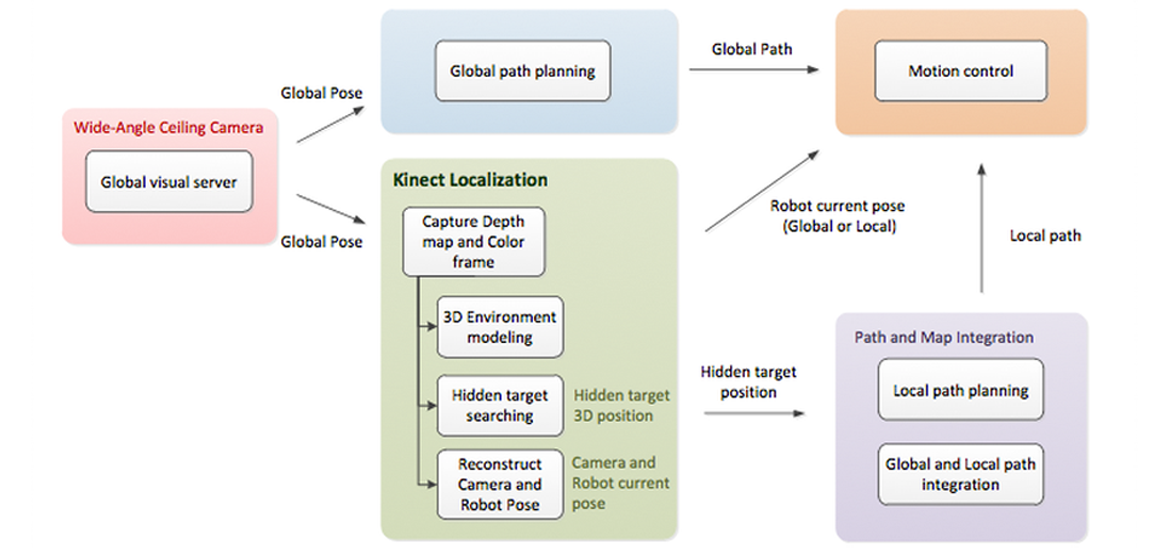
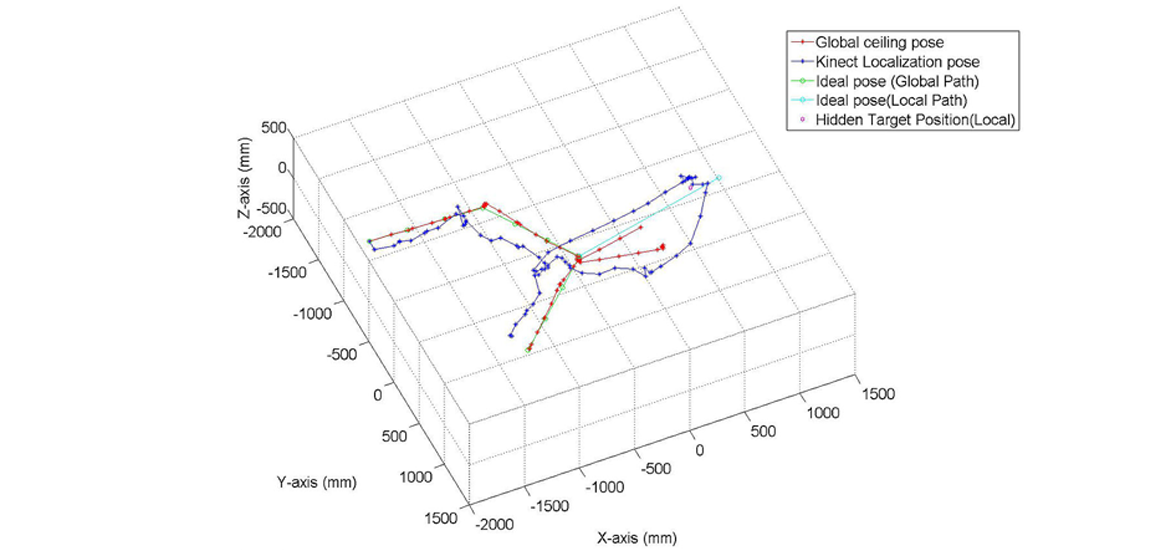
The robot follows the global path while searching for the hidden target locally. If the target exists, robot reroutes the path to arrive at the hidden target’s position as shown in figures on the right. The robot will move back to follow the global path after finishing the local mission.
The figure below shows the 3D view of the robot trajectory of the whole scenario.